










")
")

| Comparison | |||
|---|---|---|---|
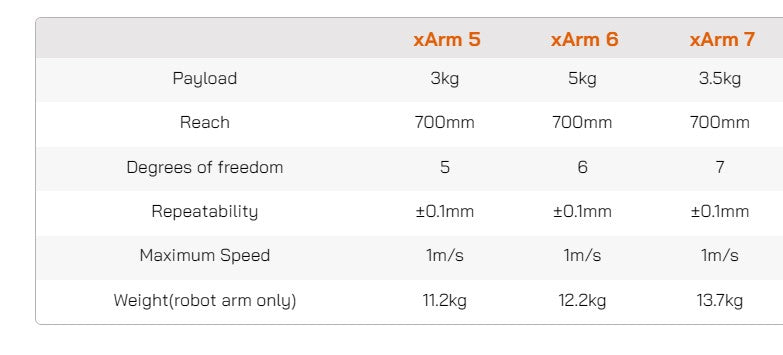
| XARM 5 | XARM 6 | XARM 7 | |
| Payload | 3kg | 5kg | 3.5kg |
| Reach | 700mm | 700mm | 700mm |
| Degrees of freedom | 5 | 6 | 7 |
| Repeatability | ±0.1mm | ±0.1mm | ±0.1mm |
| Maximum Speed | 1m/s | 1m/s | 1m/s |
| Weight(robot arm only) | 11.2kg | 12.2kg | 13.7kg |
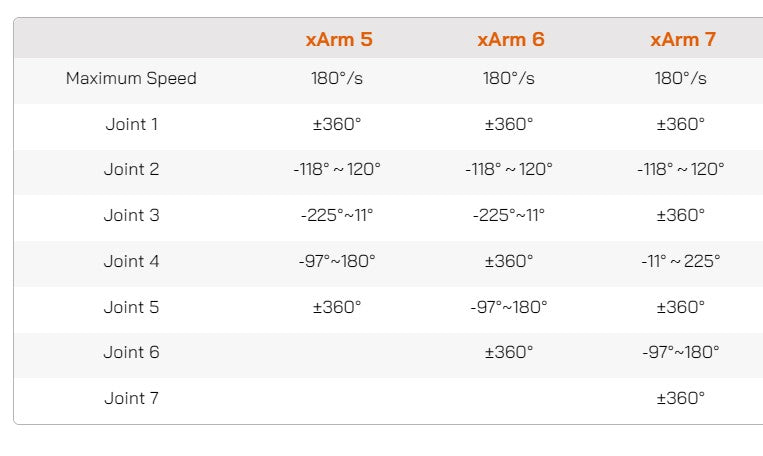
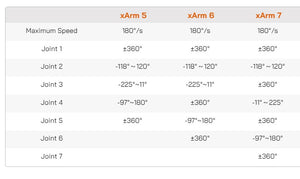
| XARM 5 | XARM 6 | XARM 7 | |
| Maximum Speed | 180°/s | 180°/s | 180°/s |
| Joint 1 | ±360° | ±360° | ±360° |
| Joint 2 | -118°?120° | -118°?120° | -118°?120° |
| Joint 3 | -225°~11° | -225°~11° | ±360° |
| Joint 4 | -97°~180° | ±360° | -11°?225° |
| Joint 5 | ±360° | -97°~180° | ±360° |
| Joint 6 | ±360° | -97°~180° | |
| Joint 7 | ±360° | ||
| Hardware | |||
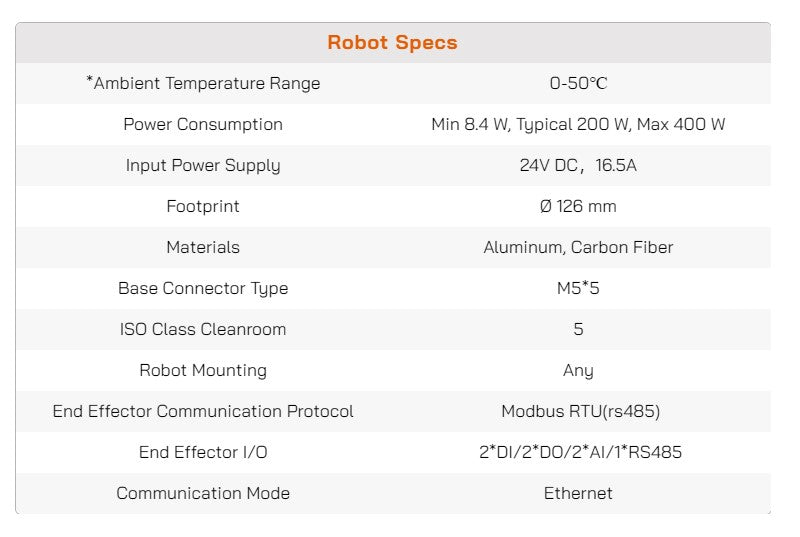
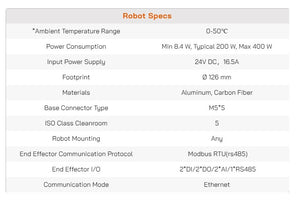
| XARM | ROBOT SPECS | ||
| *Ambient Temperature Range | 0-50? | ||
| Power Consumption | Min 8.4 W, Typical 200 W, Max 400 W | ||
| Input Power Supply | 24V DC?16.5A | ||
| Footprint | Ø 126 mm | ||
| Materials | Aluminum, Carbon Fiber | ||
| Base Connector Type | M5*5 | ||
| ISO Class Cleanroom | 5 | ||
| Robot Mounting | Any | ||
| End Effector Communication Protocol | Modbus RTU(rs485) | ||
| End Effector I/O | 2*DI/2*DO/2*AI/1*RS485 | ||
| Communication Mode | Ethernet | ||
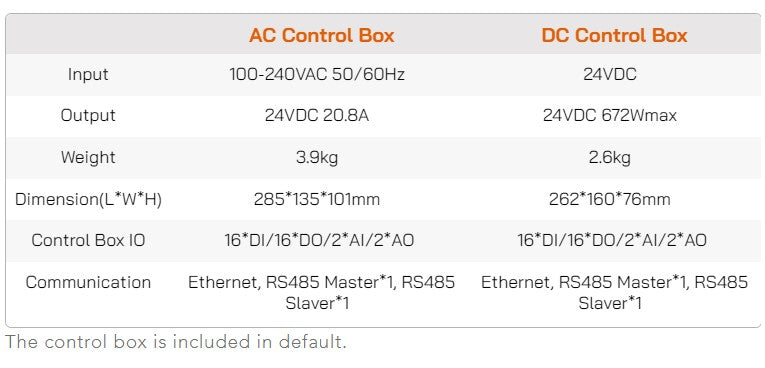
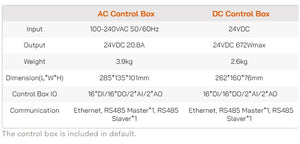
| AC CONTROL BOX | DC CONTROL BOX | ||
| Input | 100-240VAC 50/60Hz | 24VDC | |
| Output | 24VDC 20.8A | 24VDC 672Wmax | |
| Weight | 3.9kg | 2.6kg | |
| Dimension(L*W*H) | 285*135*101mm | 262*160*76mm | |
| Control Box IO | 16*DI/16*DO/2*AI/2*AO | 16*DI/16*DO/2*AI/2*AO | |
| Communication | Ethernet, RS485 Master*1, RS485 Slaver*1 | Ethernet, RS485 Master*1, RS485 Slaver*1 |